When I was prototyping a circuit in my college, one of the ground wire accidentally touched the positive of the power supply unit (PSU) and there by causing major damage to breadboard and PSU. This made me to develop this device that would avoid such accidents.
This device uses LM2576 a switching regulator, LM317 a linear regulator, and ATMega8A for controlling the power supply unit. As this needs a real time protection, I have used OS for real time simultaneous protection.
Protected Switching Power Supply:
The block diagram of this device is shown below
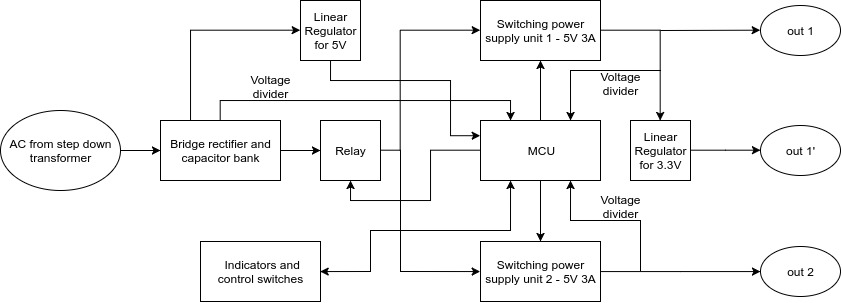
The AC step down transformer provides isolation from AC grid, the bridge rectifier and capacitor bank removes ripples to large extent, however small amount of ripples is present and this is not good for micro-controllers. In order to eliminate those ripples LM2576 is used.
There is local linear voltage regulator to power the MCU, it also drives the relay and indicators.
Why Operating System?
As I need a real time protection from short circuit, over load and low/high input voltage for both smps drivers, I have used a multitasking scheduler so that all the three tasks can execute in parallel and provide real time protection. This scheduler was described in my previous post: Preemptive Multitasking Scheduler.
Task1 monitors the input voltage and sets flag also operates the relay. Task2 and Task3 monitors the output voltage of smps1 and smps2 respectively, if the voltage drops to threshold value (set by me) the smps is cut-off and avoid over loading and short circuit.
There are two reset switches to restart smps. Also there are four control switches, sw1 to power up/standby, sw2 to enable smps1, sw3 to enable smps2, sw4 to enable short circuit and over load protection. The last switch sw4 is for my experimental purpose.
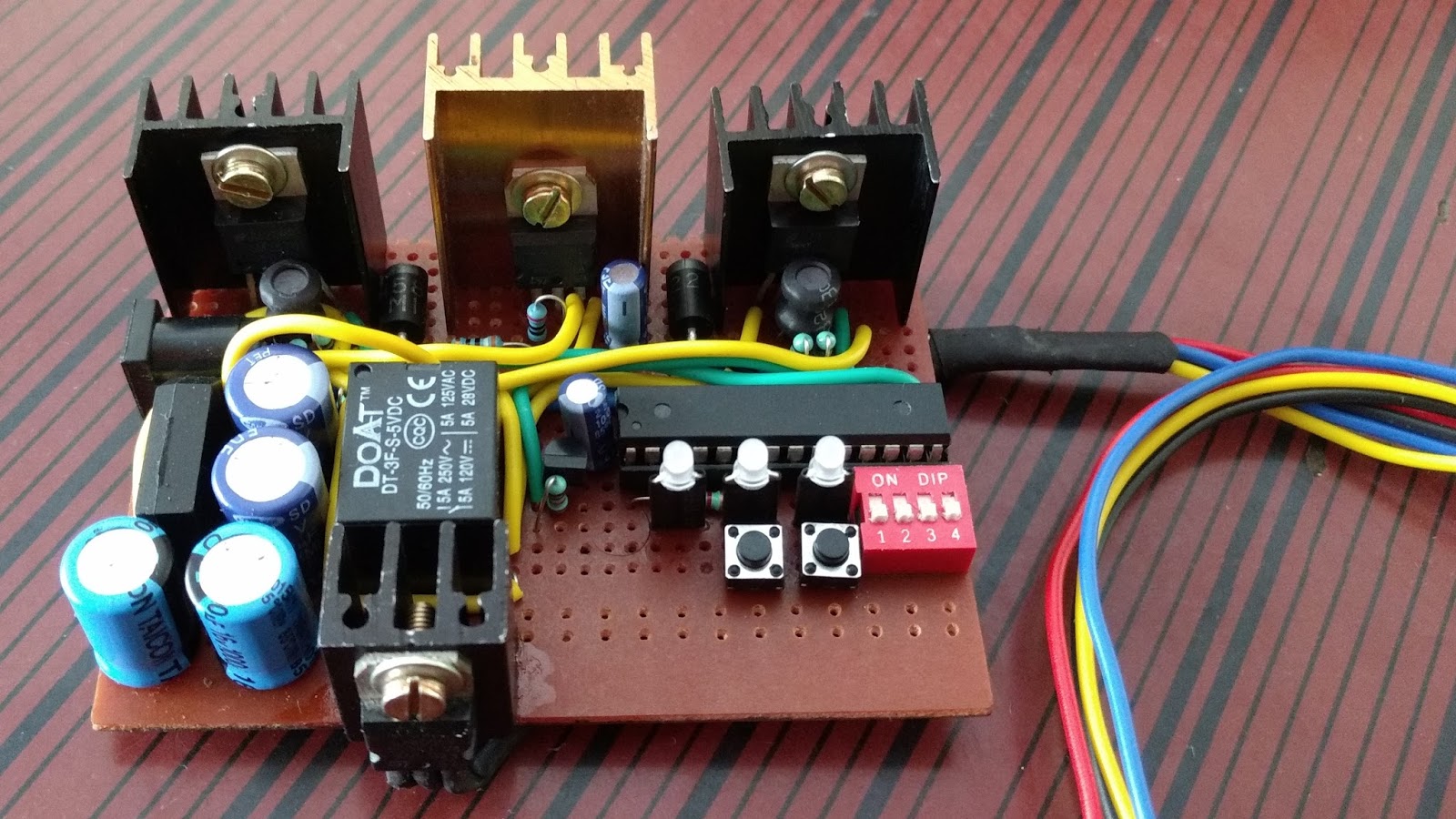
The three LEDs display status of system, smps1 and smps2 respectively.
While developing the circuit a .1uF capacitor needs to be close and to be connected to Vcc and Gnd of the MCU, else the controller misbehaves. This capacitor eliminates the noise produced when short circuit occurs.
I will not be sharing the source file this time... try building your own version of this concept and if possible suggest me some more modifications if needed in the comments below.
Back to Project Home Page
Back to Project Home Page
Comments
Post a Comment